
How Ideas2IT Built an AI Powered Golf Experience Platform That Tracks Every Shot and Turns It Into a Live Clubhouse Event
What if every golf shot on a par-3 hole was tracked in real time, composited into a broadcast-quality overlay, and streamed live to clubhouse screens, with 0 manual camera work, production crew, and highlights generated automatically? A sports technology company came to Ideas2IT to bring that ambition to life.

Client
Confidential

Industry
Technology

Service
App Development

Geography
USA

Engagement
Completed
01 Challenge
The client had a clear vision but no platform: turn every par-3 shot into a shared, broadcast-quality moment visible across clubhouse displays. The system needed to detect a golf ball mid-flight using camera and LiDAR fusion across two hardware configurations, compute trajectory and distance-to-pin in real time, switch between cameras automatically, composite live overlays onto clubhouse displays, and do all of it with sub-second latency at the edge. It also needed to scale across multiple venues with centralized monitoring and OTA updates.
02 Solution
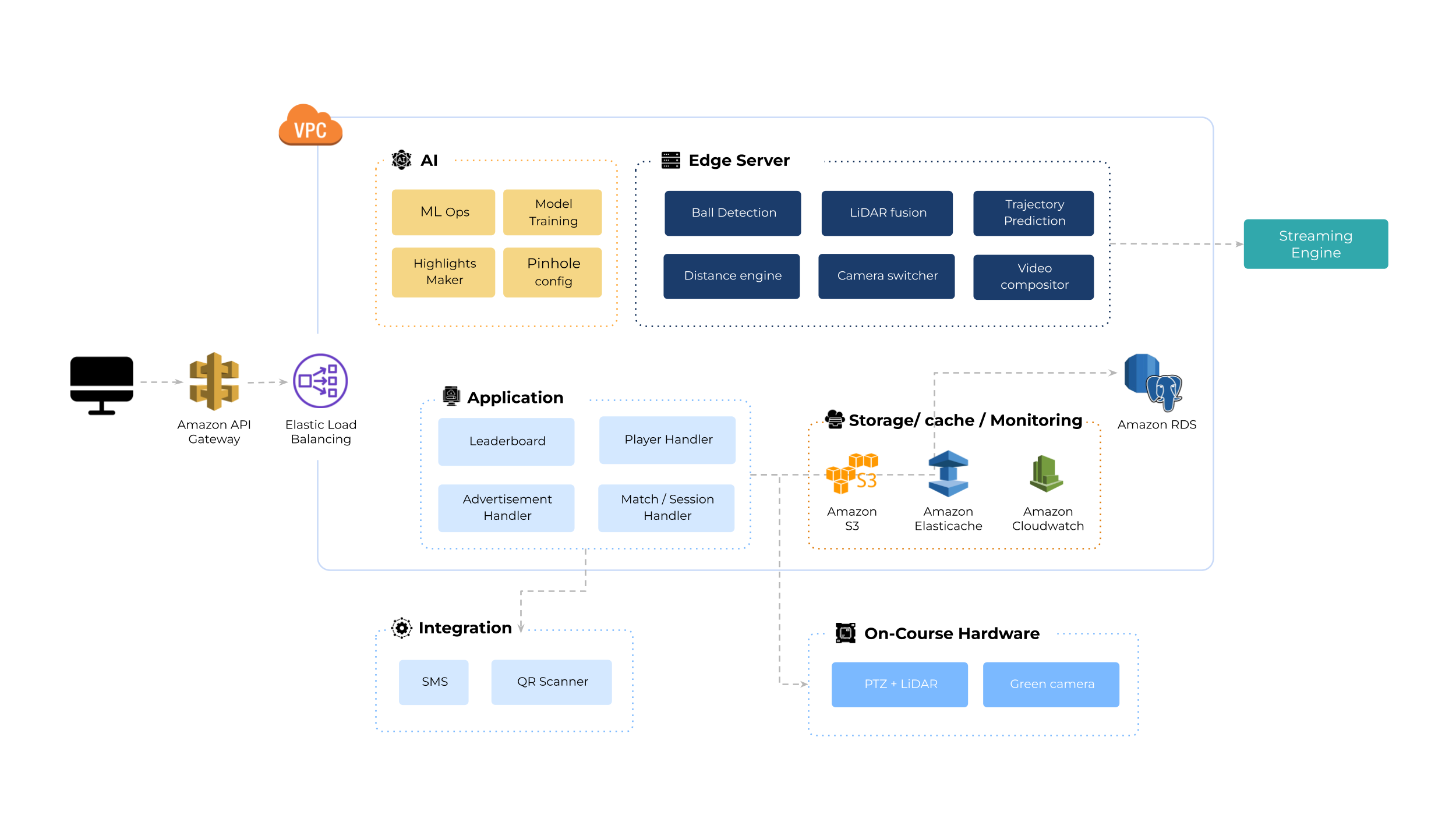
Ideas2IT designed and built a modular, four-layer platform: an infrastructure layer handling edge processing and cloud services, a platform layer for backend APIs and session management, an intelligence layer for ball tracking, trajectory modeling, camera switching, and automated highlight generation, and an experience layer for clubhouse displays, leaderboards, and spectator notifications. The system supports two tracking modes: standalone camera and LiDAR fusion with extrinsic calibration, and an integrated camera-LiDAR unit, with graceful fallback to vision-only tracking when LiDAR data is unavailable.
03 Outcome
The client went from concept to a production-ready, multi-venue golf experience platform in 8 months. Every par-3 shot is now tracked, visualized, and broadcast to clubhouse screens in real time, with spectator notifications, live leaderboards, and automated highlight reels running across venues.
Phase 01
Discovery, architecture, and a working prototype that proved real-time ball tracking works at venue scale
Discovery & Core Prototype (Month 1 to 4)
Ideas2IT defined the full system architecture, designed the UI/UX prototype, built the real-time ball tracking pipeline, and delivered a working single-venue MVP.
- End-to-end solution architecture designed across four layers: infrastructure, platform, intelligence, and experience
- Full UI/UX design and interactive prototype for clubhouse displays and admin interfaces
- Real-time ball detection pipeline built with Python, OpenCV, and YOLO/Custom CNN, fused with LiDAR point clouds via ROS 2 for 3D position estimation
- Automated tee-to-green camera switching workflow using PTZ control logic
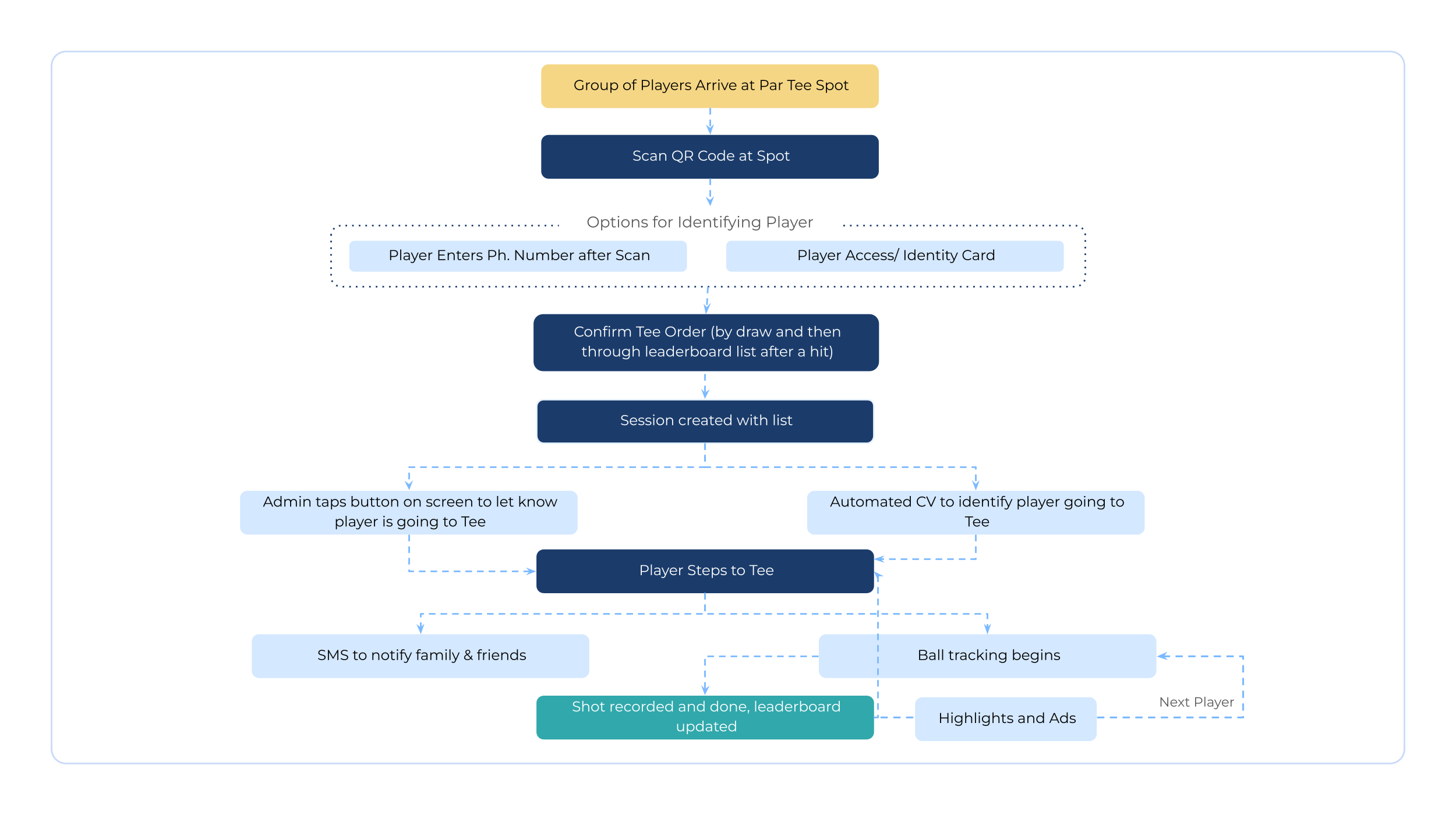
- Golfer check-in and identification system with QR scanning, phone number entry, and player access cards, with both manual admin confirmation and automated CV-based player identification at the tee
- SMS notification engine via Twilio/AWS SNS for spectator engagement triggered by player actions
- Basic admin interface with pin position updates and tap-to-recalibrate via tablet
This phase produced
- Solution architecture
- UI/UX design and prototype
- Working ball tracking system
- Automated camera switching
- Golfer check-in and identification
- SMS notification engine
- Admin interface with pin calibration
Phase 02
From working prototype to the full broadcast-style clubhouse experience
Feature Expansion (Month 4 to 6)
Ideas2IT built the trajectory visualization, distance-to-pin computation, live composited clubhouse displays, automated highlights, and the full leaderboard and admin system.
- Ball tracking enhanced with full trajectory visualization and Kalman filter prediction
- Distance-to-pin computation with calibrated camera-LiDAR setup and pin-tap recalibration
- Clubhouse display built as an Electron kiosk-mode app with live composited overlays rendered via OpenGL/OBS-based graphics engine
- Live streaming integration with real-time ball tracking overlays
- Automated highlights maker generating shot replays from tracked data
- Daily and all-time leaderboard system with real-time updates
- Idle time content rotation management for non-play periods
- Full admin interface as a React PWA for cross-platform tablet access
Deliverables:
- Trajectory visualization
- Distance-to-pin computation
- Live composited clubhouse display (Electron kiosk)
- Streaming integration with tracking
- Automated highlights maker
- Leaderboard system
- Content rotation management
- Full admin PWA
Phase 03
Production hardening and multi-venue deployment toolkit
Production Readiness (Month 6 to 8)
Ideas2IT stabilized the platform for live venue deployment with edge monitoring, MLOps pipeline, cloud orchestration, and a deployment toolkit for multi-venue rollout.
- Production-optimized tracking system tuned for real-time inference on RTX 4070 / Jetson Orin edge hardware
- MLOps pipeline for model training, versioning, and updates across venues
- Edge server monitoring with auto-recovery, health checks, and alerting via CloudWatch
- Cloud backend on AWS (Elastic Load Balancing, RDS, S3, Elasticache, API Gateway) for centralized management and OTA updates
- Deployment toolkit for standardized multi-venue rollout with venue-specific calibratio
Deliverables:
- Production-optimized tracking
- MLOps pipeline
- Edge monitoring and auto-recovery
- AWS cloud backend
- Multi-venue deployment toolkit
- OTA update system
The Outcome
A platform built for a problem that had no off-the-shelf answer, delivered in 8 months.
The client's golf experience platform now tracks every shot in real time, composites it live onto clubhouse screens, and turns a par-3 hole into a broadcast-quality spectator event. Ideas2IT took the project from concept to a production-ready, multi-venue platform in 8 months, building the full AI tracking pipeline, video compositing engine, and cloud infrastructure from scratch.